RANGER telerobotic manipulator hardware upgrade
Oct 26, 2018
·
1 min read
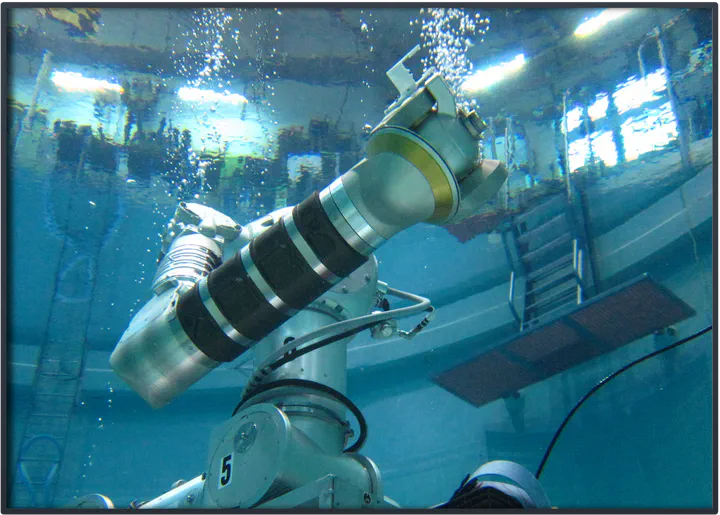
For this project we were tasked by NASA’s Satellite Servicing Capabilities Office (SSCO later SSPD and NExIS) to build technologies to aid in helping develop capabilities for on earth testing in the aid of the Restore-L (later OSAM-1) and Robotic Refeuling Mission 3 (RRM-3) program.
For this portion of the program, we were to upgrade the electronics for the University of Maryland’s Space Systems Lab’s RANGER dexterous manipulator system. RANGER was developed as part of a STS shuttle experiment for testing enabling technologies for telerobotic servicing in space.
Authors
Postdoctoral Researcher
My research interests include extreme environment robotics, small satellites, orbital debris mitigation, satellite servicing and on-orbit construction. I am currently working as a postdoctoral researcher on reusable gecko skin inspired adhesives for removing lunar dust from spacesuits and other lunar infrastructure