
Habitable Worlds Observatory 2024 Snap Talk: Robotic Servicing and Construction in the Face of Unknown Dynamics
Robotic Servicing and Construction in the Face of Unknown Dynamics
Aug 8, 2024
Earth-Analogue Roving System Development and Testing for Lunar Surface Exploration
Oct 1, 2023
Small Dexterous Space Manipulators: Technology Development and Mission Applications
Oct 1, 2022
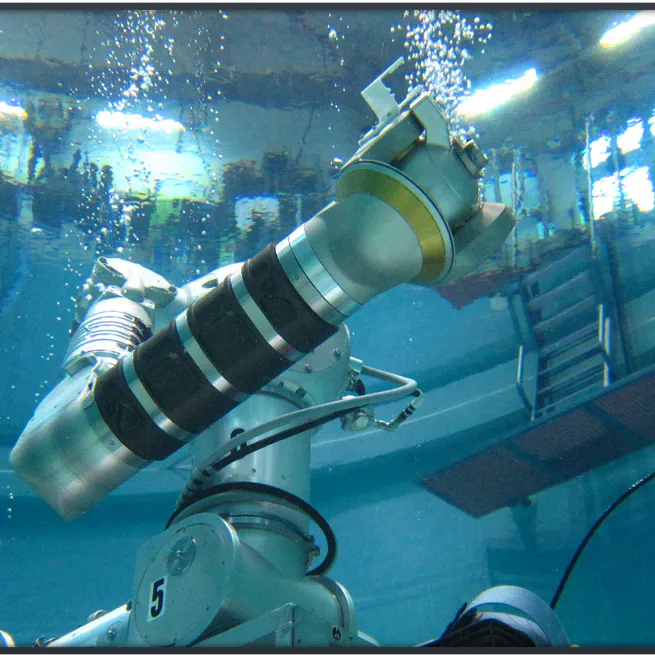
RANGER telerobotic manipulator hardware upgrade
For this project we were tasked by NASA’s Satellite Servicing Capabilities Office (SSCO later SSPD and NExIS) to build technologies to aid in helping develop capabilities for on earth testing in the aid of the Restore-L (later OSAM-1) and Robotic Refeuling Mission 3 (RRM-3) program. For this portion of the program, we were to upgrade the electronics for the University of Maryland’s Space Systems Lab’s RANGER dexterous manipulator system. RANGER was developed as part of a STS shuttle experiment for testing enabling technologies for telerobotic servicing in space.
Oct 26, 2018
RANGER: Upgrading Dexterous Space Teleoperator Capabilities by Incorporating Commercial Off-the-Shelf Components
Sep 1, 2017

ENAE488R: Topics in Aerospace Engineering; Planetary Rover Development
A design-build-test class to build a teleoperated rover for undergraduates to compete in the NASA RASC-AL RoboOps competition.
Jul 24, 2016
Neutral Buoyancy Testing of Workstations for Space Station Utilization
Oct 1, 2014
MICRO-SAT BASED DEXTEROUS ROBOTIC SATELLITE SERVICING: A CASE FOR MINIATURIZATION
Oct 1, 2014
Economies of (Small) Scale: Exploring the Potential for Smallsat-Based Dexterous Robotics
Aug 1, 2014
Miniature orbital dexterous servicing system
Jun 1, 2014